为了实现多终端同步,花了一个小时,主要是卡在提交上了,现在的CSDN真的不能再看了,太水了,都是从别的地方复制粘贴过来,很难解决你的问题,所以还是需要去看官方的文档。
用终端运行下列指令就可以将文档push到source分支里
1 | git add . |
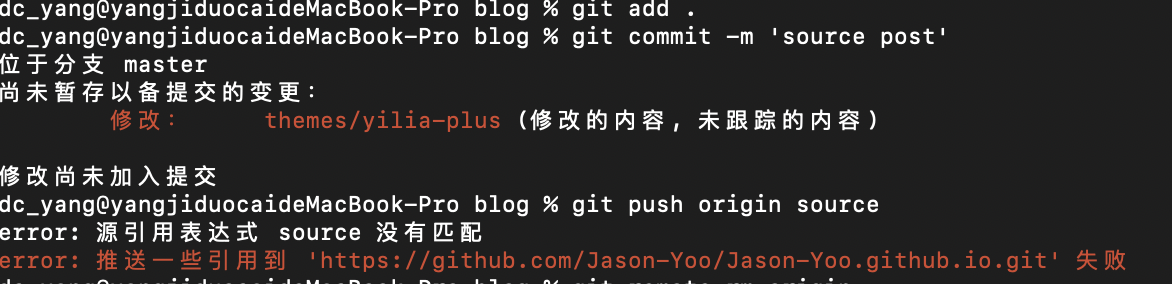
出现问题的就是最后一句,问题如下:
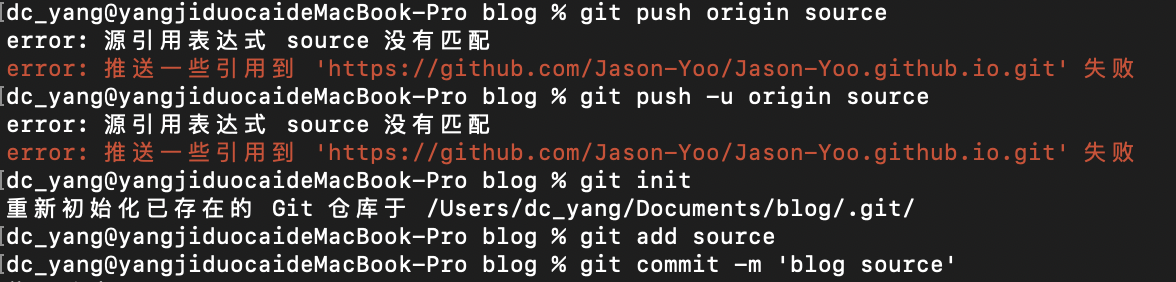
原因是在theme主题里也存在.git文件,所以会提示你:
所以在mac里,你要在finder里在theme目录下command+shift+.显示隐藏文件,然后把主题里的.git文件删除,然后就可以push进去了;
详细的可以参考:https://righere.github.io/2016/10/10/install-hexo/