40天的训练营生活总结一下:很累,很值得,很开心;

40天的训练营生活总结一下:很累,很值得,很开心;
云鲸CEO 张俊斌

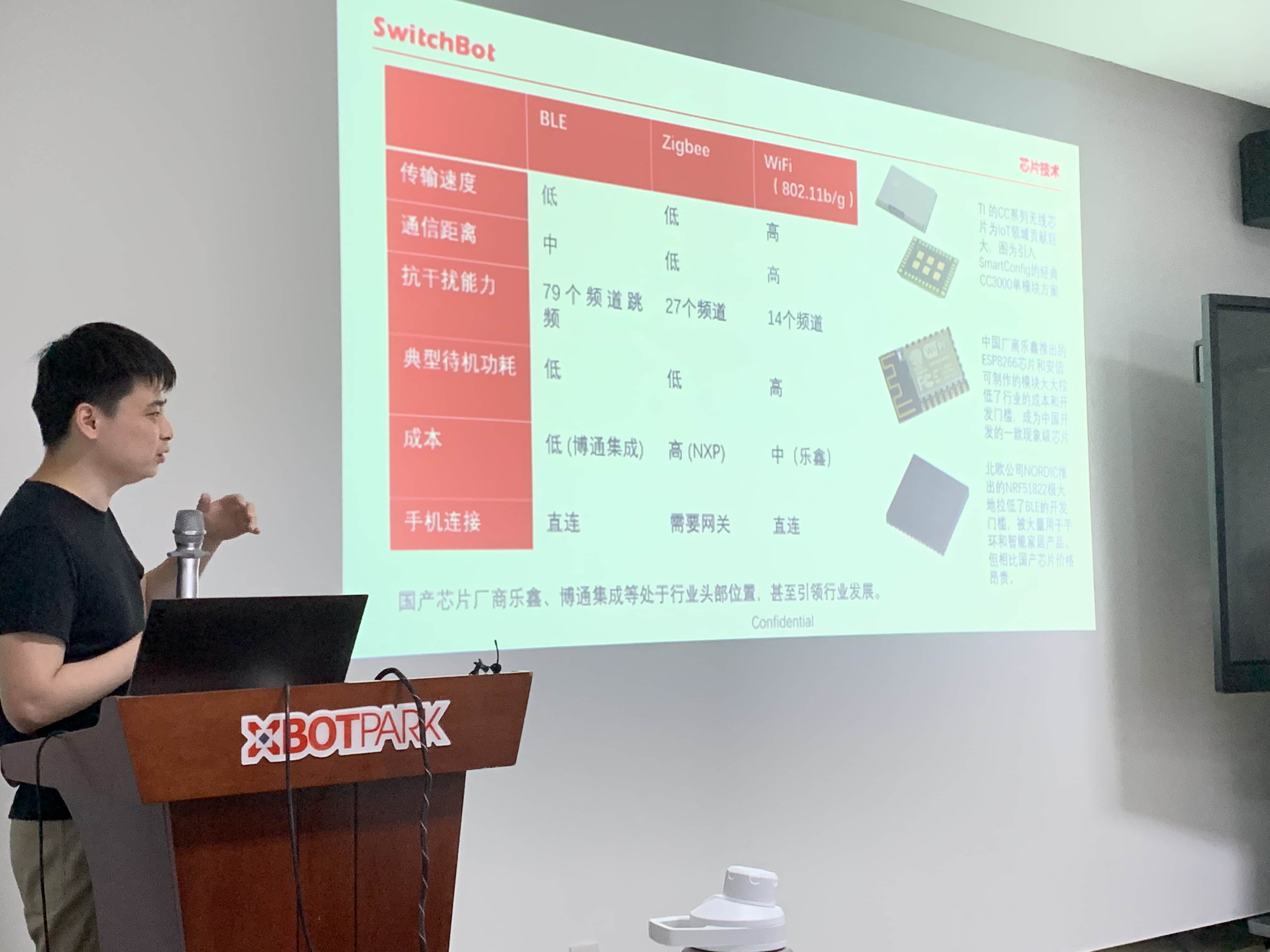
7.19 高秉强 博通集成董事

曹曦,红杉资本中国基金合伙人 —2020.7.25

量化数据对于真正深入了解用户实际使用产品的方式或产品的新可能性并不特别有用,定性研究的真正好处是提取用户所拥有体验的丰富性和细节。定性研究的一些优势是,它们可以为您提供非常深入的信息。您会发现很难测量的东西。
重点关注访谈,尤其是半结构化访谈,以及某种观察,我们将观察用户实际使用产品并了解他们如何使用产品。最后,我们将使用称为“亲和力墙”的方法进行操作,在此方法中,我们将主题分析和递归抽象相结合,以了解我们将收集的详细数据的整体含义。
2.1如何进行用户需求评估访谈,尤其是一种称为半结构化访谈的访谈
松耦合和紧耦合:
松耦合(Loosely Coupled):
松耦合是指IMU和相机分别进行自身的运动估计,然后对其位姿估计结果进行融合,两个模块更新频率不一致 , 模块之间存在一定的信息交换,在松耦合方式中以惯性数据为核心 , 视觉测量数据修正惯性测量数据的累积误差。
紧耦合(Tightly Coupled):
紧耦合是指把IMU的状态与相机的状态合并在一起,共同构建运动方程和观测方程,然后进行状态估计,IMU的尺度度量信息可以用于辅助视觉中的尺度的估计。
滤波法和优化法:
滤波:MSCKF(Multi-State Constraint KF),ROVIO
图优化:VINS,OKVIS,ORB-SLAM
vinsmono、vinsfusion、 vi_orbslam2