关于ROS的一些笔记
图概念概述
- Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。
- Messages:消息,消息是一种ROS数据类型,用于订阅或发布到一个话题。
- Topics:话题,节点可以发布消息到话题,也可以订阅话题以接收消息。
- Master:节点管理器,ROS名称服务 (比如帮助节点找到彼此)。
节点
- 一个节点其实只不过是ROS程序包中的一个可执行文件。
- ROS节点可以使用ROS客户库与其他节点通信。
- 节点可以发布或接收一个话题。
- 节点也可以提供或使用某种服务。
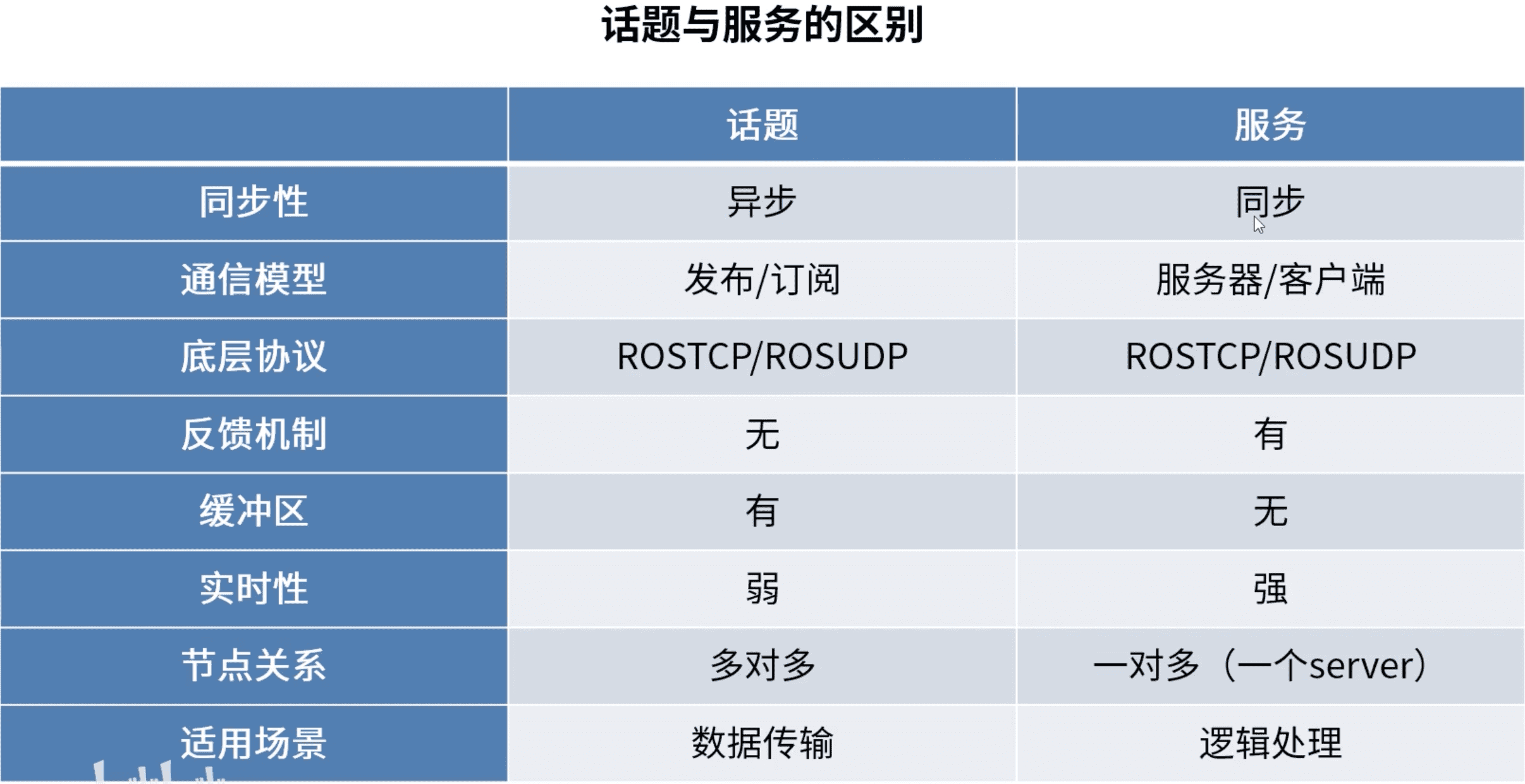
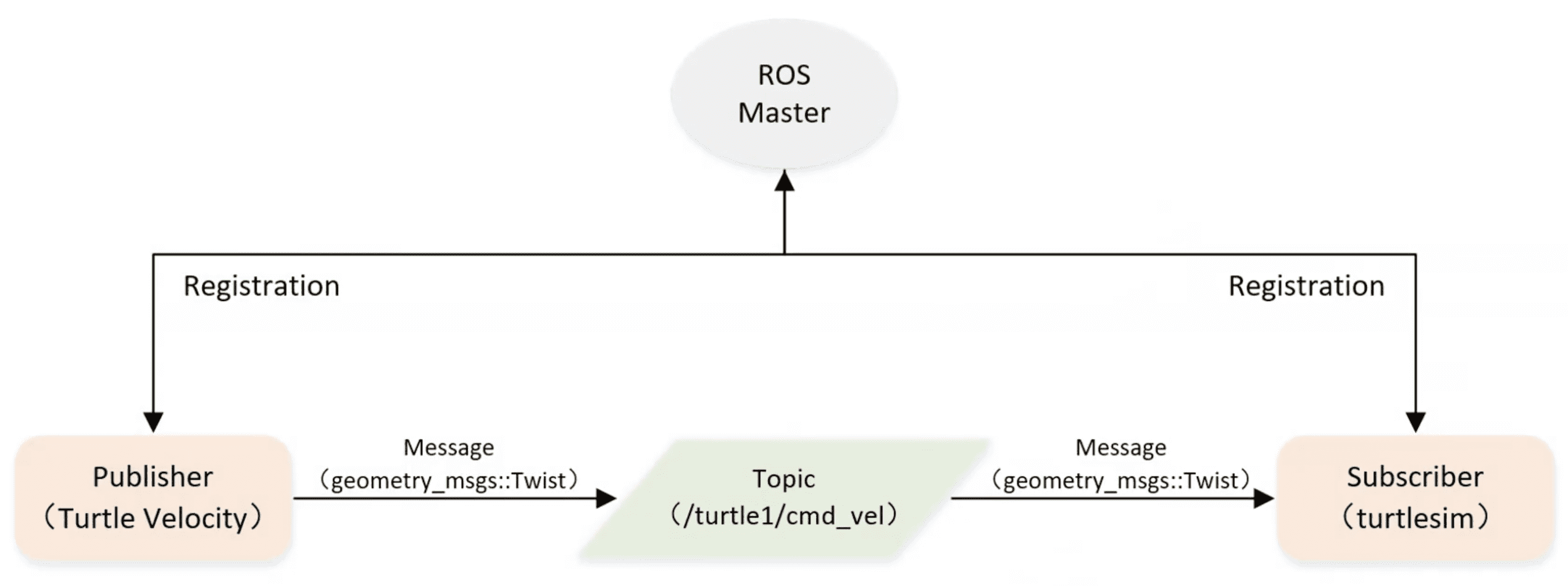
ROS Topics
- turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。
- turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息。
ROS Messages
- 话题之间的通信是通过在节点之间发送ROS消息实现的。
- 对于发布器(turtle_teleop_key和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。
- 这意味着话题的类型是由发布在它上面的消息类型决定的。
- 使用rostopic type命令可以查看发布在某个话题上的消息类型。
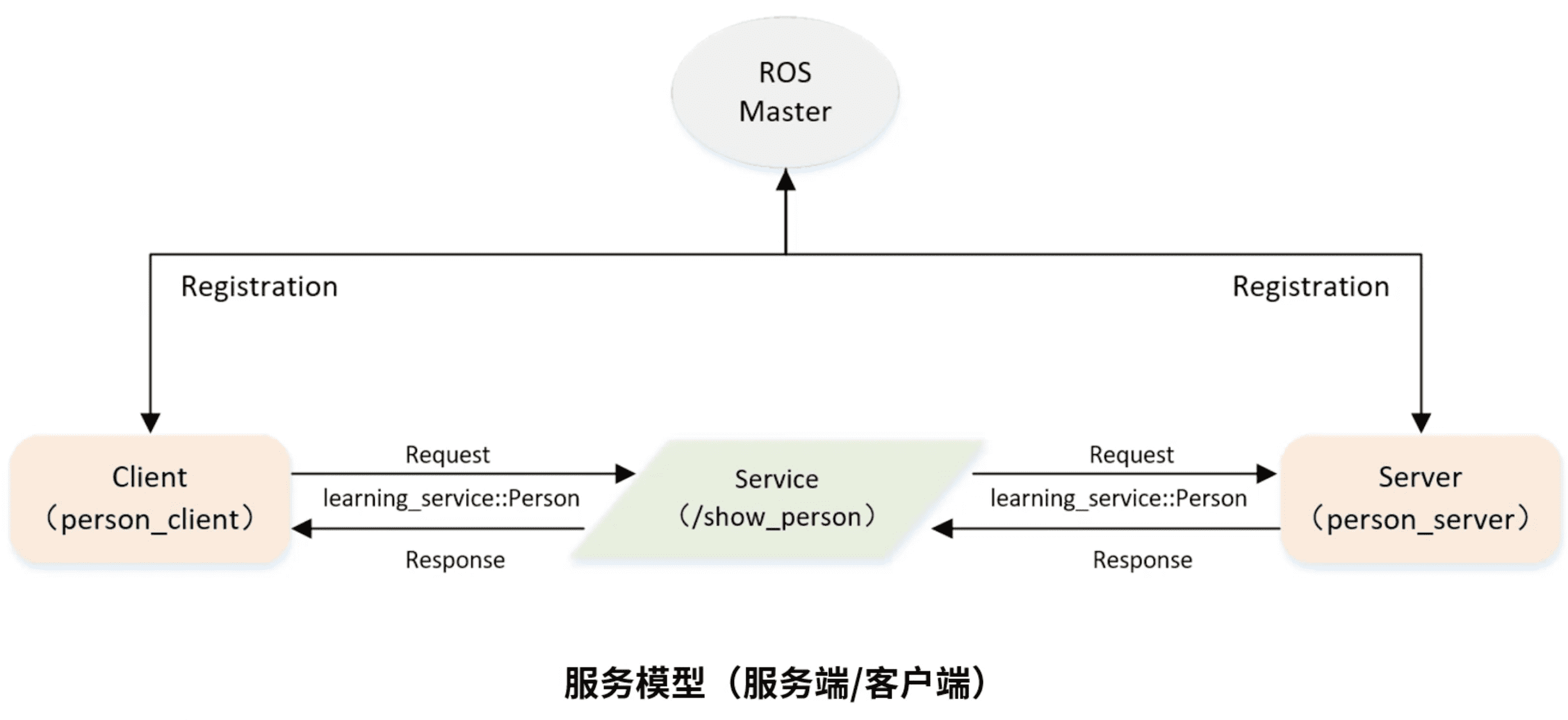
ROS Services
- 服务(services)是节点之间通讯的另一种方式。
- 服务允许节点发送请求(request) 并获得一个响应(response)
消息(msg)和服务(srv)